Breadboard Quad
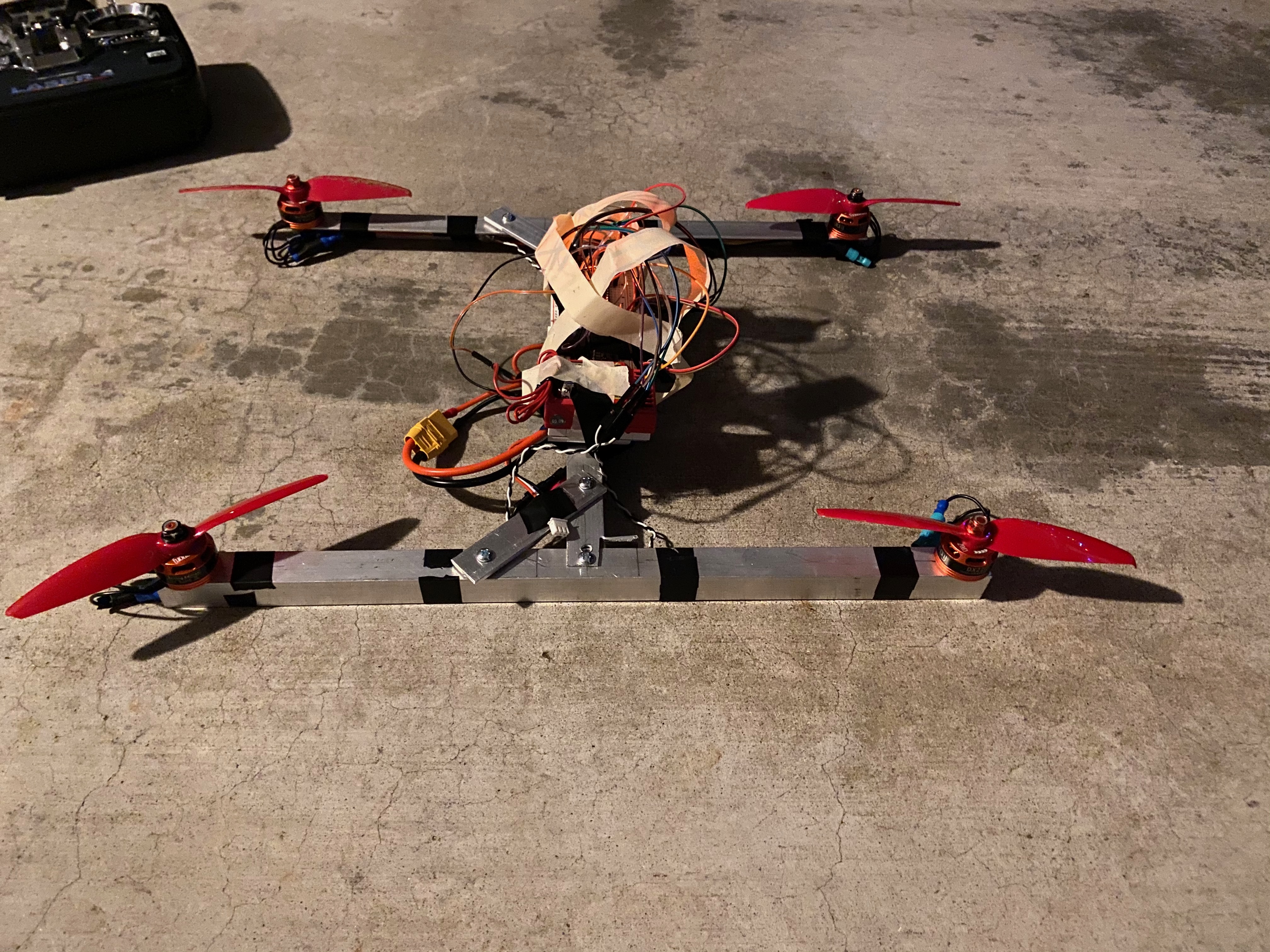
First off, yes, that is a breadboard taped to the drone. For this project, my objective was simply to get something
flying. It had been a while since I had done hands on electronics, so I wanted to avoid as much soldering as possible.
The components of note are:
Some technical specs:
To the right can be seen a video of the first (mostly) controlled flight. Success!
There's a lot of potential improvements that could be made. I had to get to a quite high throttle to take off, and an even higher throttle to get out of ground effect. However, the motors are certainly capable of providing the power. At this disk loading, the ideal power is 123W - even if losses through the powertrain were 75%, each of the motors would be pulling less than 15% of their rated max power. This indicates to me that the props probably are not a high enough pitch. Of course, I could always decrease the size of the rather large battery. The frame could be a bit stiffer about the roll axis (aligned with breadboard) as well. Alas, shortly after first flight I had to return back to university and leave the quad behind, so these improvements are for another time.
The components of note are:
- 2S 5000 mAh battery
- Teensy 4.1 Microcontroller
- MPU9250 IMU
- 30A ESCs
- 2300 kV 400W Brushless Motors
- 6042 Props
Some technical specs:
- Weight: 800g
- Fuel/battery mass fraction: 72%!
- Motor spacing: 12"x16"
- Frame: Fastened 90 degree aluminum, 1/16" thick
To the right can be seen a video of the first (mostly) controlled flight. Success!
There's a lot of potential improvements that could be made. I had to get to a quite high throttle to take off, and an even higher throttle to get out of ground effect. However, the motors are certainly capable of providing the power. At this disk loading, the ideal power is 123W - even if losses through the powertrain were 75%, each of the motors would be pulling less than 15% of their rated max power. This indicates to me that the props probably are not a high enough pitch. Of course, I could always decrease the size of the rather large battery. The frame could be a bit stiffer about the roll axis (aligned with breadboard) as well. Alas, shortly after first flight I had to return back to university and leave the quad behind, so these improvements are for another time.